Iterative Learning For Periodic Quadrocopter Maneuvers Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Overview on Iterative Learning For Periodic Quadrocopter Maneuvers

Supplementary material for the test no. 3 (implemented for the mathematical model of the This is a video attachment related to the publication: "Experimental Our goal is to enable autonomous systems - such as the flying robot in the video - to ' Many systems perform the same task over and over again and make exactly the same error. EAC Assistant Director, Mark Collyer, discusses the concept of Supplemental video for paper "Robust Trajectory Optimization Under Frictional Contact with
Perching with a robotic insect using adaptive tracking control and Experimental results on a two axes descend to observe the ground effect. The Iterative Learning based Biplane-Quadrotor Transition
Core Information
Explore the key sources for Iterative Learning For Periodic Quadrocopter Maneuvers.
Developments

Stay updated on Iterative Learning For Periodic Quadrocopter Maneuvers's latest milestones.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding Iterative Learning For Periodic Quadrocopter Maneuvers from verified contributors.

Iterative Learning for Periodic Quadrocopter Maneuvers
Quadrocopter Slalom Learning
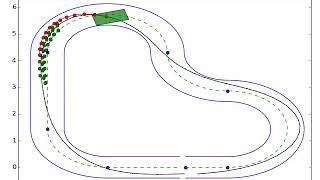
Berkeley MPC Lab's Iterative Learning Model Predictive Control (LMPC)
Deep Dive
Data is compiled from public records and verified media reports.
Last Updated: May 23, 2026
Summary

For 2026, Iterative Learning For Periodic Quadrocopter Maneuvers remains one of the most talked-about profiles. Check back for the newest reports.
Disclaimer:


















