Turtlebot2 Obstacle Avoidance Using Reinforcement Learning Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Background to Turtlebot2 Obstacle Avoidance Using Reinforcement Learning

This is the final output of my attempt to simulate Virtual Force Field Algorithm in TurtleBot of ROS2. ROS: [Turtlebot 2] Obstacle Avoidance Using Kinect by Nada and Ashwaq Get instant access to MATLAB & Simulink books, guides, and course files to boost your skills! Get Access Now: ... This video shows real-robot deployment of SAC-PV-STAM, a deep Turtlebot2 Multi Agent System obstacle avoidance demo Final Project of the course : Autonomous Robot (2016/2017) Universitat de Girona - Master en enginyeria informàtica Authors ...
My robot now has a more robust action space to choose from. The action space consist of 3 different translation velocities (0.05, ... Dynamic Obstacle Avoidance for CDPRs with Mobile Bases via Sim-to-Real Reinforcement Learning Turtlebot 2 controlled by a reinforcement learning model trained in a Unity3D simulation
Important Facts

Explore the main sources for Turtlebot2 Obstacle Avoidance Using Reinforcement Learning.
Recent Updates

Stay updated on Turtlebot2 Obstacle Avoidance Using Reinforcement Learning's newest achievements.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding Turtlebot2 Obstacle Avoidance Using Reinforcement Learning from verified contributors.
Turtlebot2 obstacle avoidance using reinforcement learning
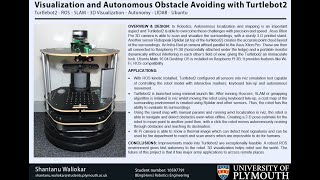
Autonomous Obstacle Avoiding and Visualization with Turtlebot2 - Proj324
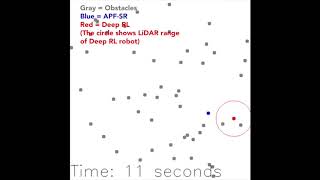
Dynamics Obstacle Avoidance using Deep Reinforcement Learning

Obstacle Avoidance and Path Planning Simulation using Turtlebot in ROS2
Full Guide
Data is compiled from public records and verified media reports.
Last Updated: May 24, 2026
Summary

For 2026, Turtlebot2 Obstacle Avoidance Using Reinforcement Learning remains one of the most talked-about profiles. Check back for the newest reports.
Disclaimer:





![ROS: [Turtlebot 2] Obstacle Avoidance Using Kinect by Nada and Ashwaq](https://i0.wp.com/ytimg.googleusercontent.com/vi/BJ6di42R8zU/mqdefault.jpg?resize=320,180)











![Python & ROS _ Obstacle Avoiding Turtlebot Robot [Code In Description]](https://i0.wp.com/ytimg.googleusercontent.com/vi/5L95R6ePKqo/mqdefault.jpg?resize=320,180)
