Path Planning Using C Capt Algorithm For 3d Quadrotors Simulation Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Background on Path Planning Using C Capt Algorithm For 3d Quadrotors Simulation

RRT stands for Rapidly-exploring Random Trees, which is a Quadrotor 3D Path Planning, Trajectory Generation and Control
Main Features

Explore the primary sources for Path Planning Using C Capt Algorithm For 3d Quadrotors Simulation.
History

Stay updated on Path Planning Using C Capt Algorithm For 3d Quadrotors Simulation's newest achievements.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding Path Planning Using C Capt Algorithm For 3d Quadrotors Simulation from verified contributors.
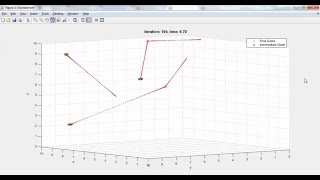
Path Planning using C-Capt algorithm for 3D Quadrotors - Simulation
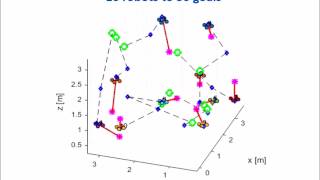
C-CAPT Simulation on 3D Quadrotors

A-Star-Algorithm-and-Advanced-Path-Planning-for-Drone-Simulation
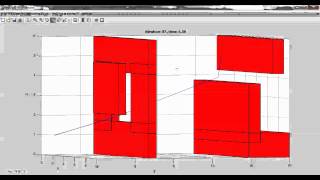
Control and Path Planning of Quadrotors in an Obstacle Filled Environment - Simulation
Expert Insights
Data is compiled from public records and verified media reports.
Last Updated: May 24, 2026
Summary

For 2026, Path Planning Using C Capt Algorithm For 3d Quadrotors Simulation remains one of the most searched-for profiles. Check back for the latest updates.
Disclaimer:



















