Large Scale Data Driven Robotic Learning Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Background on Large Scale Data Driven Robotic Learning

Presentation by Sergey Levine prepared for the "Towards Generalist This lecture discusses the challenges and goals of modern By utilizing a small number of human demonstrations, a recent TRO paper by researchers at of pisa and Bulk material handling is a critical, labor-intensive operation across various industries, traditionally performed by human operators ... In this video, we break down the top 6 human-in-the-loop The RobotriX: An eXtremely Photorealistic and Very-
Jaime Fisac is an Assistant Professor of Electrical and Computer Engineering at Princeton University. This talk was given on ... Swarming is a method of operation where multiple autonomous systems act as a cohesive unit by actively coordinating their ... Recording of a talk prepared for the Industrial Assembly Workshop at RSS 2023, covering recent work on CIS – “Get to know your neighbors” Seminar Series “Improving Using BayesOpt to find effective policies for dynamic and difficult tasks with soft A video explaining key concepts in the paper "A Framework for
Key Details

Explore the main sources for Large Scale Data Driven Robotic Learning.
History

Stay updated on Large Scale Data Driven Robotic Learning's newest achievements.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding Large Scale Data Driven Robotic Learning from verified contributors.
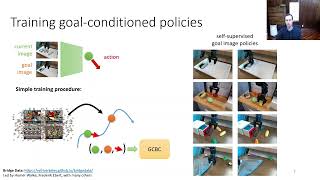
Large-Scale Data-Driven Robotic Learning

Large-scale data collection with an array of robots
Robot Learning 2025: Foundational Models for Robotics and Scaling DeepRL
Full Guide
Data is compiled from public records and verified media reports.
Last Updated: May 24, 2026
Future Outlook

For 2026, Large Scale Data Driven Robotic Learning remains one of the most talked-about profiles. Check back for the newest reports.
Disclaimer:
















